- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик
Co to jest maszyna do rowkowania CNC V
2023-12-22
Wraz z szybkim rozwojem systemu przemysłowego w moim kraju, coraz więcej firm ma coraz wyższe wymagania dotyczące procesu gięcia blach, w tym niektórych innych blach, dlatego coraz więcej firm decyduje się na proces gięcia blach. Ze względu na konkurencję rynkową wymagane jest wykonanie wstępnej obróbki rowków w pozycji zginanej. Dążenie klientów do estetyki produktu odpowiednio wzrasta, dlatego proces rowkowania stał się obecnie procesem niezbędnym przed procesem gięcia. Wraz z ciągłym pogłębianiem procesu strugania. Coraz więcej gałęzi przemysłu zaczyna stosować proces żłobienia; wiele z nich obejmuje gałęzie przemysłu zaawansowanych technologii, które również korzystają z procesu żłobienia. Główne branże zastosowania procesu strugania obejmują: przemysł lekki, urządzenia elektryczne, samochody, obróbkę stali nierdzewnej, dekoracje architektoniczne, przemysł meblarski, sprzęt kuchenny, sprzęt wentylacyjny, przemysł lotniczy, windy, podwozia, szafki itp. Proces rowkowania obejmuje V- obróbka rowków w kształcie litery U, obróbka rowków w kształcie litery U i obróbka nieregularnych rowków. Fazowanie krawędzi blachy, cięcie i struganie blachy itp.

1. Cel i zastosowanie projektowania i produkcji maszyn do rowkowania
1.1 Po tym, jak rowkarka wykona rowkowanie blachy w kształcie litery V, kąt zgięcia blachy będzie łatwy do utworzenia podczas procesu gięcia, a kąt R po uformowaniu będzie bardzo mały. Obrabiany przedmiot nie jest łatwo skręcony lub odkształcony, a prostoliniowość, kąt, dokładność wymiarowa i wygląd przedmiotu obrabianego po zgięciu i uformowaniu mogą zapewnić dobre wyniki.
1.2 Po wykonaniu rowków w kształcie litery V w blasze na maszynie do rowkowania, wymagana siła zginająca zostanie zmniejszona, dzięki czemu długie i grube blachy będą mogły być gięte na giętarce o mniejszym tonażu. Zmniejszy to zużycie energii przez maszynę.
1.3 Rowkarka może również wykonać wstępną obróbkę znakowania na blasze, dzięki czemu obrabiany przedmiot może podczas procesu gięcia zapewnić dużą dokładność wielkości krawędzi gięcia.
1.4 Zgodnie ze specjalnymi wymaganiami dotyczącymi procesu rowkowania, maszyna do rowkowania może obrabiać rowki w kształcie litery U na powierzchni niektórych arkuszy, dzięki czemu obrobiona powierzchnia może być piękna, antypoślizgowa i praktyczna do łączenia.
2. Klasyfikacja i sposoby przetwarzania maszyn do rowkowania
2.1.Maszyny do rowkowania dzielą się na dwie kategorie: maszyny do rowkowania dyskretnego i maszyny do rowkowania portalowego (poziome).
2.2. Do maszyn do rowkowania pionowego zaliczają się maszyny do rowkowania z pojedynczym i podwójnym uchwytem narzędziowym. Jednonarzędziowa maszyna do rowkowania końcowego wykorzystuje rowkowanie prostopadłe. Maszynę do rowkowania z podwójnym uchwytem narzędziowym można podzielić na rowkowanie prawostronne i lewostronne. Można go także używać z dwoma uchwytami narzędziowymi do jednoczesnego wykonywania rowków prawoskrętnych i lewostronnych. Może również wykorzystywać dwukierunkowe rowkowanie tam i z powrotem.
2.3.Gantry maszyny do rowkowania można podzielić na maszyny do rowkowania z jednym napędem i maszyny do rowkowania z podwójnym napędem. Obie maszyny do rowkowania korzystają z trybu obróbki z prawym skrawaniem.

Pozioma maszyna do szybkiego rowkowania v
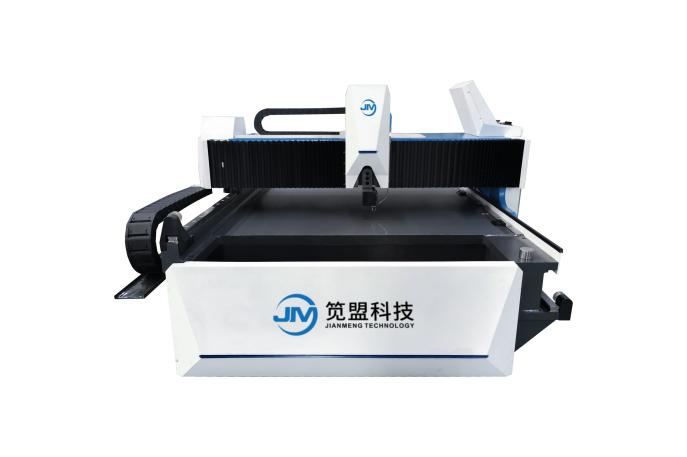
Pozioma maszyna do rowkowania z podwójnym napędem

Pionowa maszyna do szybkiego rowkowania v

Pionowa maszyna do rowkowania w przód i w tył

W pełni automatyczna czterostronna maszyna do rowkowania v
3. Kategorie ściskania i mocowania maszyn do rowkowania
3.1.Pionowe maszyny do rowkowania można podzielić na urządzenia hydrauliczne, urządzenia pneumatyczne i urządzenia mieszające gaz-ciecz.
3.2. Bramowa maszyna do rowkowania, podobnie jak pionowa maszyna do rowkowania, jest również podzielona na urządzenie hydrauliczne, urządzenie pneumatyczne i urządzenie mieszające gaz-ciecz.
4.Struktura maszyny do rowkowania
4.1.Pionowe maszyny do rowkowania można podzielić na dwa typy: spawanie całego ciała i połączenia śrubowe. Ponieważ połączenia śrubowe powodują poluzowanie i odkształcenie połączeń sprzętu podczas podnoszenia i transportu sprzętu, powszechnie stosuje się typ spawania całego ciała. Główne, spawane, duże części łoża maszyny są hartowane gazem ziemnym w celu wyeliminowania naprężeń. Po spawaniu cała maszyna poddawana jest obróbce na bramowym centrum obróbczym CNC.
4.2.W bramowej maszynie do rowkowania zastosowano technologię spawania całego ciała. Całe łoże i suwnica są hartowane gazem ziemnym w celu wyeliminowania naprężeń, a następnie cała maszyna jest poddawana obróbce przy użyciu suwnicowego centrum obróbczego CNC.
4.3. Konstrukcja korpusu rowkarki pionowej składa się z lewej i prawej kolumny, stołu warsztatowego, płyty dociskowej podpórki narzędziowej, belki poprzecznej, tylnej ramy przyrządu pomiarowego, podpórki narzędziowej do planowania i innych głównych elementów.
4.4. Konstrukcja korpusu rowkarki bramowej składa się z głównych elementów, takich jak stół warsztatowy, rama suwnicy i podpórka na narzędzia.
4.5.Pionowe i bramowe maszyny do rowkowania nie tylko eliminują naprężenia, ale także zapewniają doskonałe efekty lakiernicze poprzez piaskowanie.
4.6.Wszystkie panele stołów warsztatowych maszyn do rowkowania pionowego i bramowego są spawane ze stali nr 45. Rama jest spawana z blachy stalowej Q345. Cała obrabiarka ma dobrą sztywność, jest mocna i trwała.
5. Zasady pracy i jazdy maszyny do rowkowania
5.1.Napęd roboczy rowkarki pionowej
a. Stół warsztatowy maszyny do rowkowania zaprojektowano tak, aby miał humanizowaną wysokość około 850 mm. Powierzchnia robocza została zaprojektowana z użyciem stołu z materiału 9crsi o wysokiej wytrzymałości znajdującego się poniżej ścieżki ruchu uchwytu narzędzia, o twardości chromu wynoszącej 47-50 stopni, aby zapewnić trwałość powierzchni roboczej.
b. Napęd maszyny do rowkowania składa się z X, Y, Z i W. Osie X, Z i W są odpowiednio zainstalowane na belce płyty dociskowej. Oś X to oś obróbki i cięcia, która głównie kontroluje długość obróbki blachy. Napędzany jest przez 3-modułową zębatkę śrubową, przekładnię śrubową ze stopu aluminium, silnik wrzecionowy o mocy 5,5 kW i reduktor gwiazdowy o przełożeniu 1:5. Oś Z i W napędzane są odpowiednio za pomocą szlifowanych śrub kulowych z podwójną nakrętką o średnicy 32 mm. Oraz serwomotor o mocy 1kW, dwa komplety prowadnic w kształcie jaskółczego ogona oraz sprzęgła do napędu. Oś Y jest osią posuwu zderzaka tylnego. Kontroluje głównie odległość pomiędzy rowkami obróbki blachy. Montuje się go na ramie tylnego zderzaka stołu warsztatowego. Składa się z jednonakrętkowej śruby kulowej o średnicy 32 mm, liniowej szyny prowadzącej o średnicy 30 mm i paska synchronicznego o średnicy 8 mm. Koło synchroniczne o przełożeniu 1:2, napędzane serwomotorem o mocy 2kW.
5.2.Napęd roboczy rowkarki bramowej
A. Platforma robocza maszyny do rowkowania jest zaprojektowana na przyjazną dla użytkownika wysokość około 700 mm, którą mogą płynnie podnosić 2 osoby i ładować bez przeszkód. Prowadnice liniowe lewa i prawa główna oraz pomocnicza przeznaczone są do montażu po obu stronach stołu warsztatowego. Jednonapędowa rowkarka bramowa. Zębatka montowana jest po stronie sterowania. Stojak dwunapędowej rowkarki bramowej montowany jest po obu stronach łoża stołu warsztatowego.
b. Napęd rowkarki jest podzielony na X (oś belki), Y (oś ruchu uchwytu narzędziowego w lewo i w prawo), Y2 (oś ruchu przedniej stopki w lewo i w prawo) oraz oś Z (ruch uchwytu narzędziowego w górę i w dół oś). Oś X opiera się głównie na długości obróbki blachy i jest główną osią cięcia. Jest zainstalowany na suwnicy i przechodzi przez silnik wrzecionowy o mocy 5,5 kW, reduktor gwiazdowy o przełożeniu 1:5, pasek synchroniczny o średnicy 8 mm i dwa koła synchroniczne A o przełożeniu 1:1, przekładnię śrubową z trzema matrycami ze stopu aluminium i zębatkę śrubową zamontowaną na zębatce na łóżku do jazdy. Osie Y1 i Y2 są odpowiednio ruchomymi osiami posuwu, które głównie kontrolują wielkość odległości pomiędzy szczelinami. W przypadku wykorzystania osi Y1 do obróbki uchwytów narzędziowych, na suwnicy instalowana jest również oś pozycjonowania o wymaganej wielkości obróbki, poprzez serwomotor o mocy 1 kW, pas synchroniczny 8 mm, dwa koła synchroniczne o przełożeniu 1:1,5 oraz dwie prowadnice liniowe 30mm (górna prowadnica wyposażona jest w 2 gniazda ślizgowe, a dolna prowadnica w 3 gniazda ślizgowe), napędzane pojedynczą śrubą kulową o średnicy 32mm. Oś Y2 to oś lewej i prawej płyty ruchu przedniej stopki dociskowej. Jest zsynchronizowany z Y1. Wszystkie jednocześnie otrzymują instrukcje dotyczące wprowadzenia wymiarów obróbczych i biegną do wymaganej pozycji. Oś Y2 jest zainstalowana w dolnej części łóżka i przechodzi przez serwomotor o mocy 1 kW. Do napędu zastosowano pasek rozrządu o średnicy 8 mm, dwa koła synchroniczne o przełożeniu 1:1,5, śrubę kulową z pojedynczą nakrętką o średnicy 32 mm oraz dwa drążki chromowane polerowane o średnicy 45 mm. Oś Z jest osią posuwu uchwytu narzędziowego, która opiera się głównie na głębokości obrabianego arkusza. Przechodzi przez serwomotor o mocy 1 kW, śrubę kulową z podwójną nakrętką o średnicy 32 mm i dwie prowadnice liniowe o średnicy 35 mm (każda wyposażona w dwa suwaki) oraz sprzęgło do napędu.
c.Jeśli maszyna do rowkowania jest zaprojektowana z podwójnym napędem i dodana jest oś X2, oś X2 zostanie zaprojektowana tak, aby działała synchronicznie z osią X1.


